
Physics-Informed Edge-Aware Thermal Gaussian Splatting SLAM
The thermal-depth 3D Gaussian Splatting SLAM framework
1 Gwangju Institute of Science and Technology (GIST) 2 Holiday Robotics 3 Ajou University
* First author · † Corresponding author
Conventional SLAM systems that rely on photometric alignment or point features often fail in the texture-sparse, low-contrast imagery produced by thermal cameras. We present PI-EAT-SLAM (Physics-Informed Edge-Aware Thermal Gaussian Splatting SLAM), the first thermal-depth 3D Gaussian Splatting SLAM framework. Instead of depending on raw photometric intensity, our approach exploits robust geometric edge features to achieve reliable tracking and mapping in visually degraded environments. A Stefan-Boltzmann law-based rescaling module physically enhances thermal contrast without amplifying noise; a multi-stage Gradient-aware Edge-KLT (GE-KLT) tracker establishes highly reliable correspondences via dual-constraint outlier rejection; and an edge-aware smoothness loss preserves sharp thermal boundaries during mapping. Extensive experiments on public and custom datasets show that PI-EAT-SLAM achieves superior tracking accuracy and highly competitive novel-view synthesis compared to state-of-the-art baselines.
Stefan-Boltzmann radiance rescaling (L ∝ T⁴) restores true thermal contrast while suppressing sensor noise.
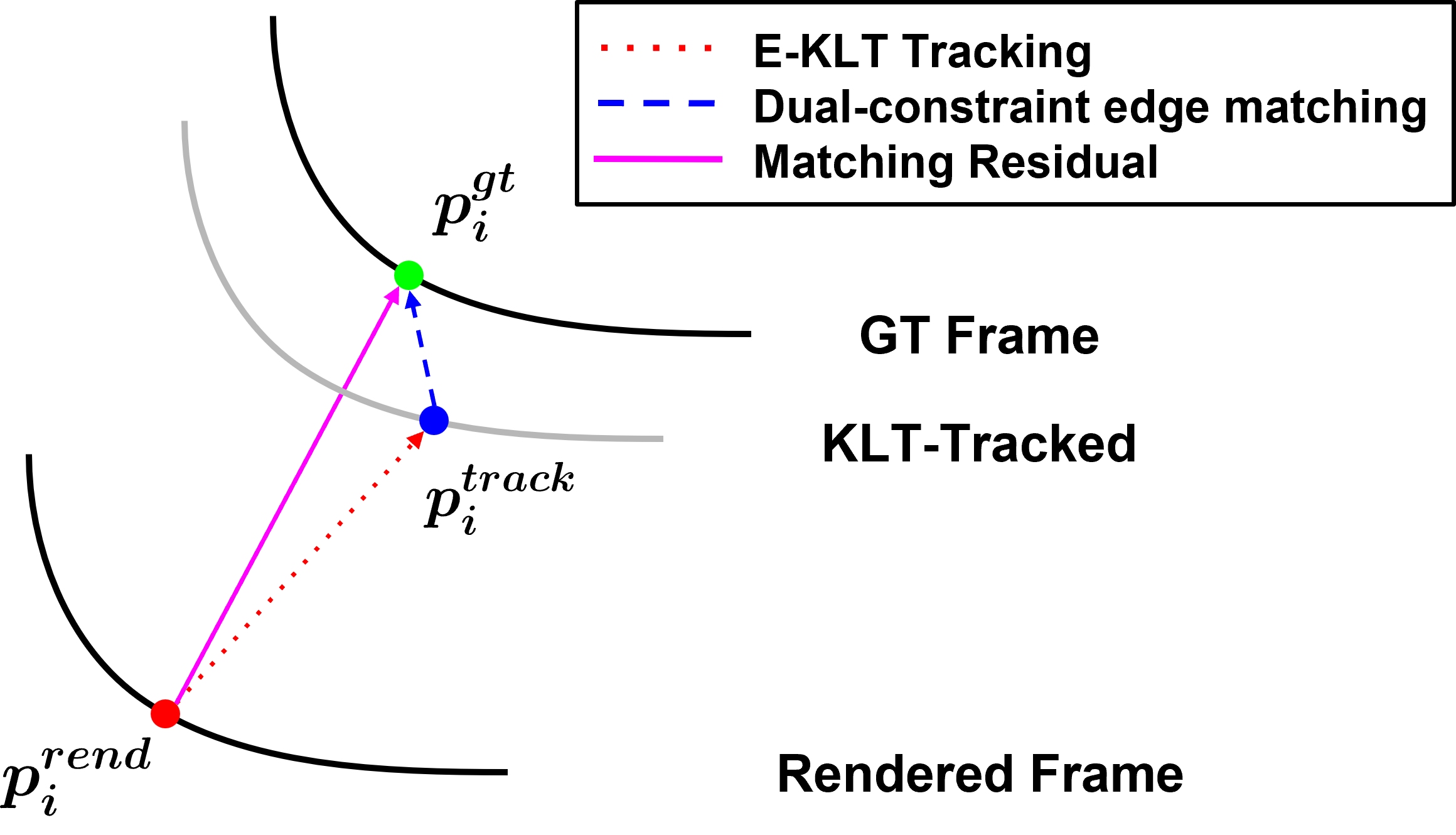
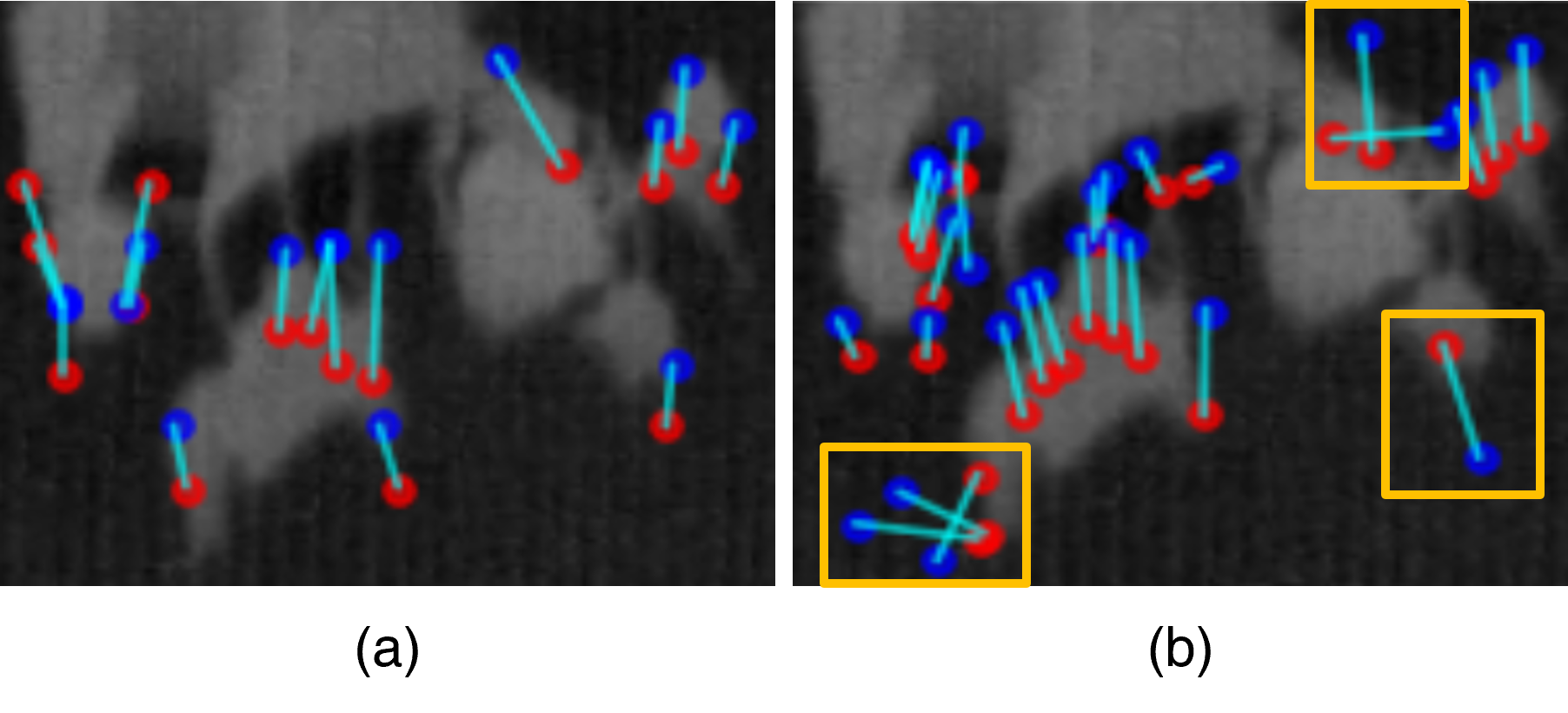
GE-KLT couples KLT tracking with nearest-neighbor matching under spatial + gradient-directional dual-constraint outlier rejection.
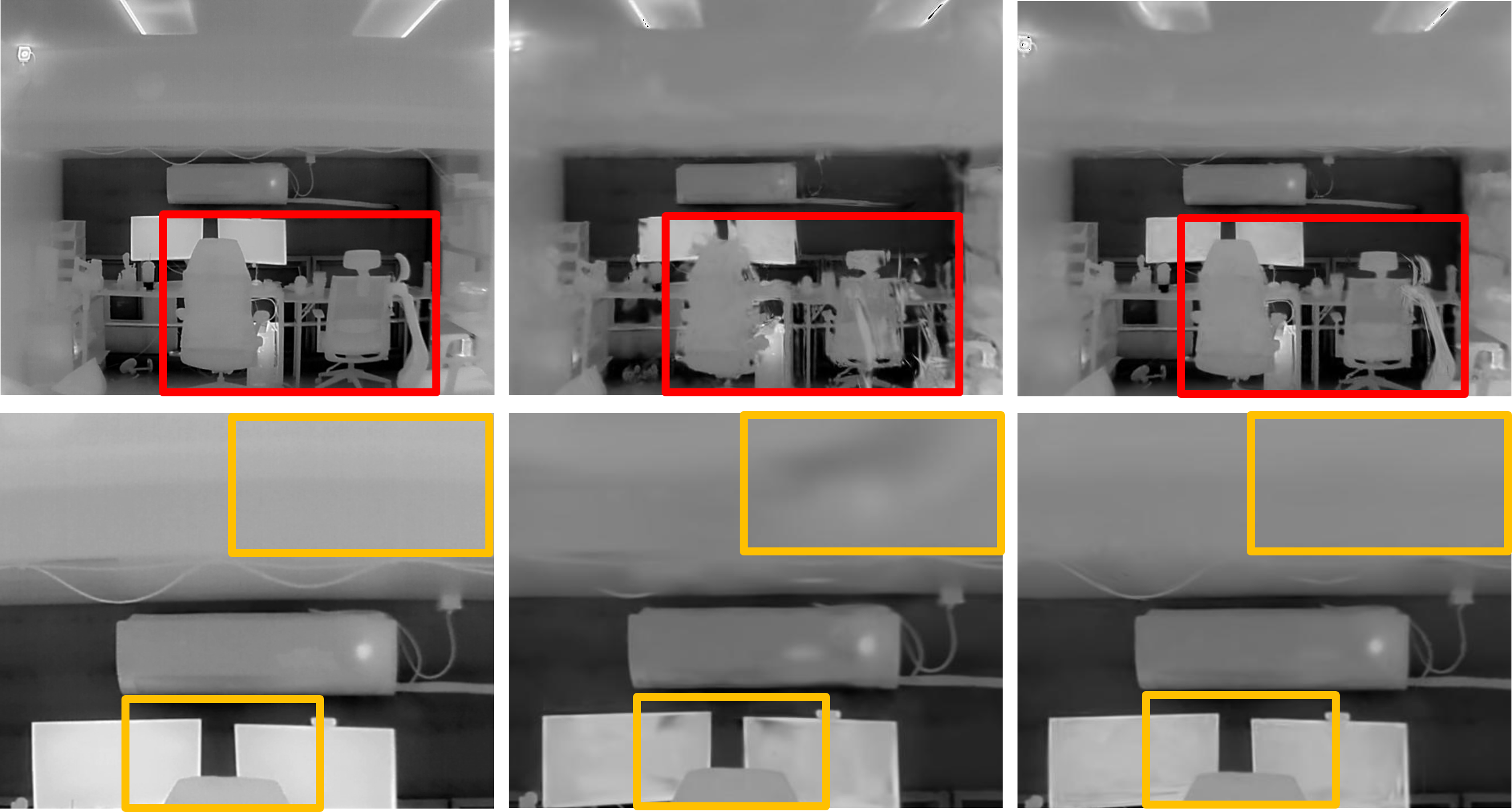
An edge-aware smoothness loss enforces thermal equilibrium while preserving sharp boundaries in dense 3DGS.
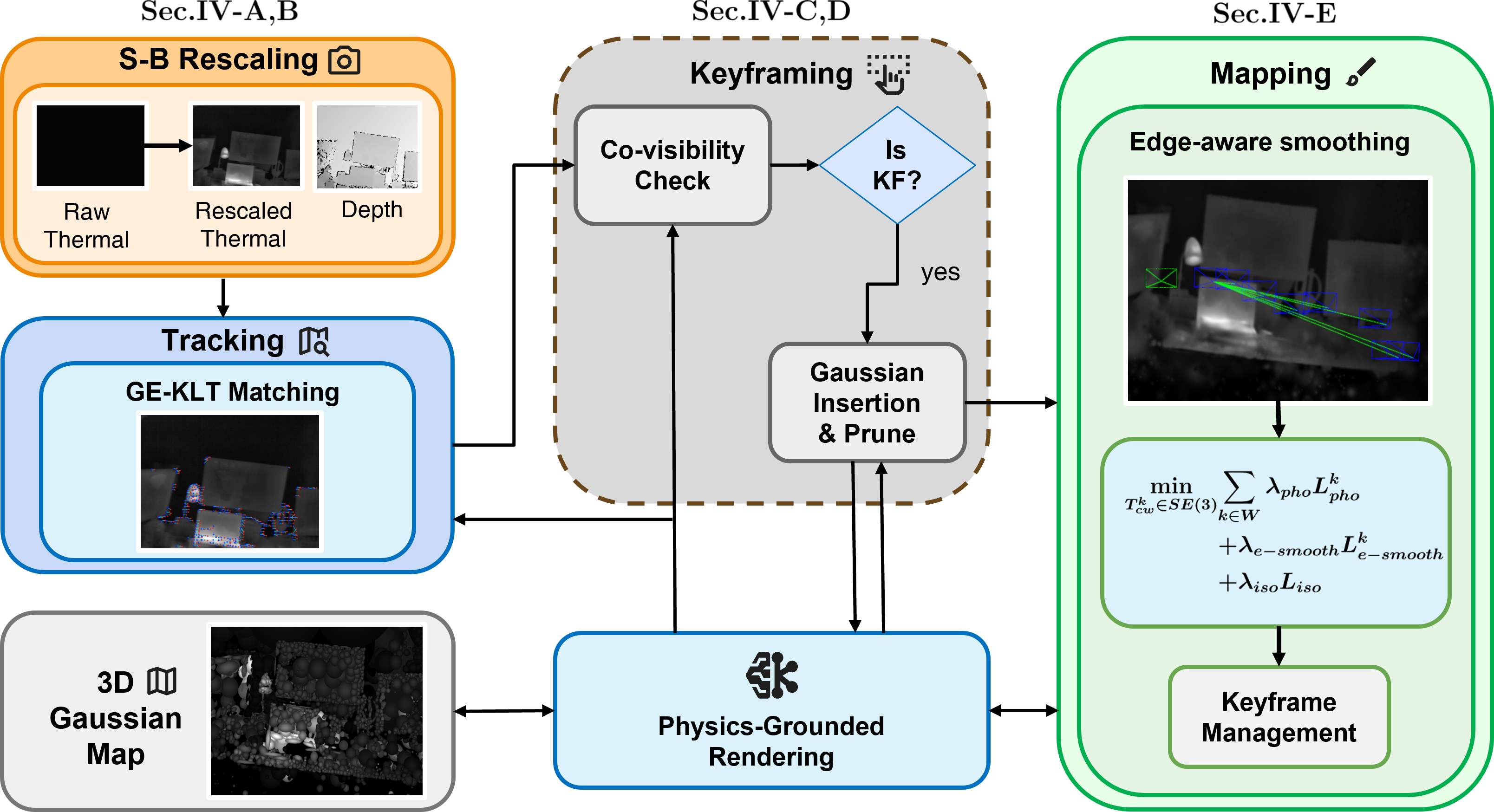
Raw 14/16-bit thermal data must be compressed to 8 bits for tracking. Conventional min-max scaling loses critical thermal detail and contrast. We instead convert raw intensities to an absolute temperature map and apply the Stefan-Boltzmann law to obtain surface radiance, which is proportional to the fourth power of temperature. This non-linear mapping amplifies subtle but physically meaningful temperature variations far better than linear scaling — yielding sharper, less noisy 8-bit images. CLAHE and bilateral filtering then sharpen local detail while attenuating noise.
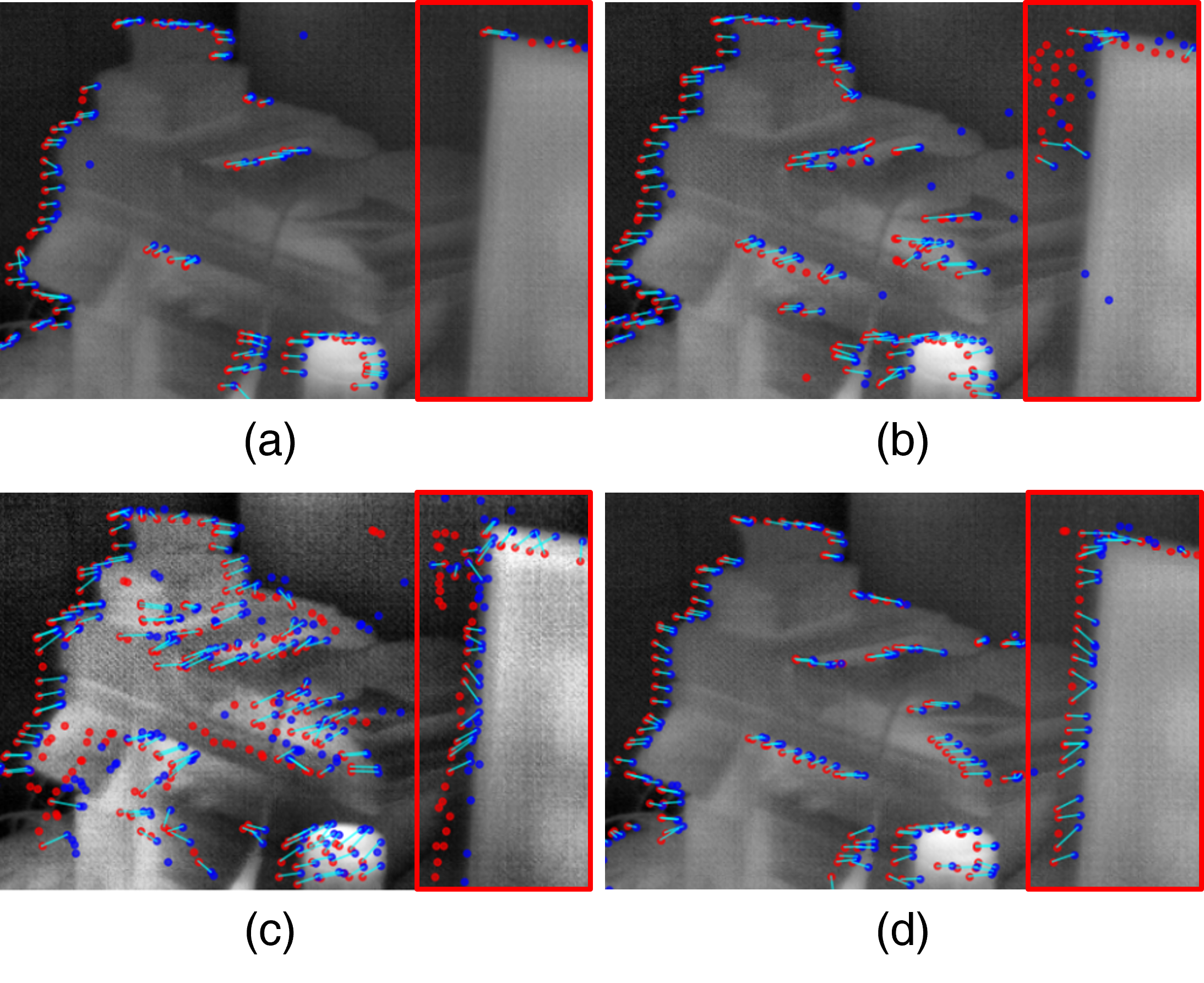
Pure photometric alignment is fragile in thermal imagery. Our multi-stage matching pipeline combines KLT tracking (local patch appearance) with high-confidence Canny edges through three sequential outlier-rejection stages: (1) distance-based filtering, (2) dual-constraint matching that requires both spatial proximity and gradient-directional agreement, and (3) residual-based rejection. This strictly anchors matches to true physical boundaries, dramatically improving pose-estimation robustness in contrast-limited scenes.
Standard smoothness losses oversmooth important geometric boundaries. Our edge-aware smoothness loss applies strong smoothing in flat regions while strictly preserving sharp thermal discontinuities, enforcing natural thermal equilibrium. A sigmoid-weighted edge term down-weights regularization exactly where strong radiance gradients occur, so the final 3DGS map stays crisp at object boundaries and clean in homogeneous regions.
Here Ri,j is the rendered thermal radiance at pixel (i, j) after rescaling and M is the total pixel count; the sigmoid edge weight wedge ≈ 0 in flat regions (strong smoothing) and ≈ 1 near strong edges (boundaries preserved). The final mapping loss aggregates the photometric loss, our edge-aware smoothness loss, and isotropic regularization over keyframes k in the window W:
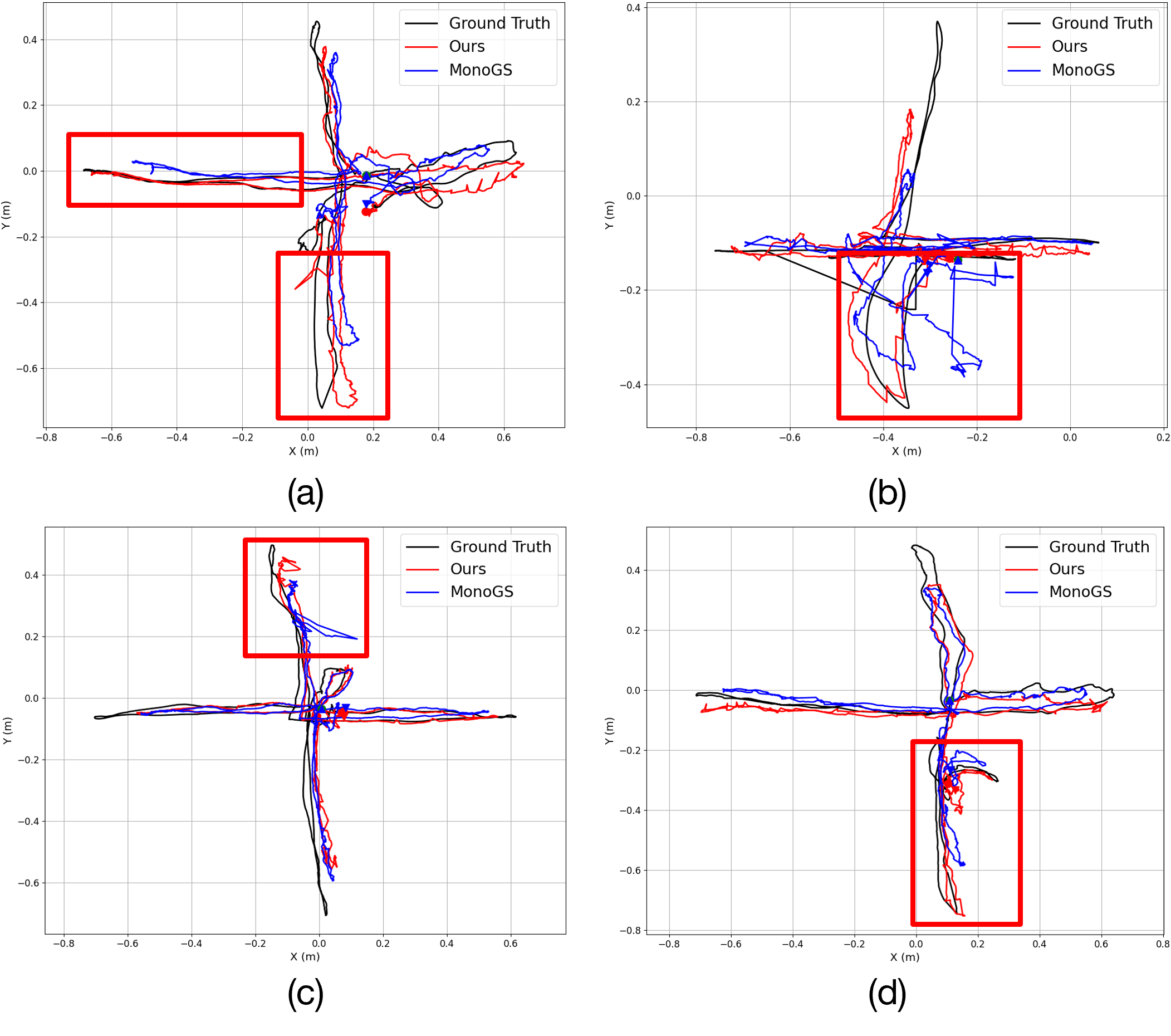
| Sequence | ORB2 (RGB-D) | ORB2 (Thermal-D) | MonoGS (Thermal-D) | Thermal-D Odom | Ours |
|---|---|---|---|---|---|
| Bright | |||||
| ds1-xyz | 0.0119 | 0.0832 | 0.0641 | 0.0719 | 0.0541 |
| ds1-xyz-ps | 0.0402 | 0.1412 | 0.0419 | 0.0154 | 0.0314 |
| ds1-hfsp | 0.1061 | 0.4416 | 0.0959 | 0.0582 | 0.0485 |
| ds2-xyz | 0.0618 | Fail | Fail | 0.0375 | 0.0865 |
| ds2-hfsp | 0.0759 | 0.1525 | 0.1536 | 0.0288 | 0.1435 |
| Varying (illumination changes) | |||||
| ds1-xyz-ic | Fail | 0.2502 | 0.0815 | 0.1151 | 0.0553 |
| ds1-xyz-ic-ps | Fail | 0.3490 | 0.0609 | 0.0778 | 0.0520 |
| ds1-hfsp-ic | Fail | 0.4674 | 0.0797 | 0.0514 | 0.0452 |
| ds2-xyz-ic | Fail | 0.2032 | 0.1705 | 0.1136 | 0.0840 |
| ds2-hfsp-ic | Fail | 0.1889 | 0.0988 | 0.1099 | 0.0626 |
| Method | Metric | Easy | Difficult | ||||
|---|---|---|---|---|---|---|---|
| xyz | sfm | circle | upper_turn | down_turn | up_down | ||
| MonoGS | PSNR ↑ | 25.54 | 27.22 | 21.81 | 15.31 | 11.36 | 12.66 |
| SSIM ↑ | 0.941 | 0.943 | 0.876 | 0.528 | 0.268 | 0.284 | |
| LPIPS ↓ | 0.179 | 0.145 | 0.207 | 0.540 | 0.690 | 0.656 | |
| HI-SLAM2 | PSNR ↑ | 23.66 | 24.41 | 22.36 | 19.43 | 18.54 | 20.10 |
| SSIM ↑ | 0.916 | 0.895 | 0.885 | 0.855 | 0.846 | 0.865 | |
| LPIPS ↓ | 0.193 | 0.196 | 0.207 | 0.464 | 0.467 | 0.400 | |
| Ours (Mono) | PSNR ↑ | 25.42 | 27.29 | 23.73 | 20.82 | 11.85 | 15.26 |
| SSIM ↑ | 0.944 | 0.944 | 0.920 | 0.870 | 0.326 | 0.436 | |
| LPIPS ↓ | 0.168 | 0.141 | 0.158 | 0.378 | 0.661 | 0.574 | |
@inproceedings{pieatslam2026, title = {PI-EAT-SLAM: Physics-Informed Edge-Aware Thermal Gaussian Splatting SLAM}, author = {Kim, Junpyo and Yeom, Seonwook and Yang, Seonmo and Ham, Jungil and Shin, Hyeonji and Kim, Changhyeon and Lee, Hyeonbeom and Kim, Pyojin}, booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, year = {2026} }